Project: Catcher ... in the rye
Technical details:
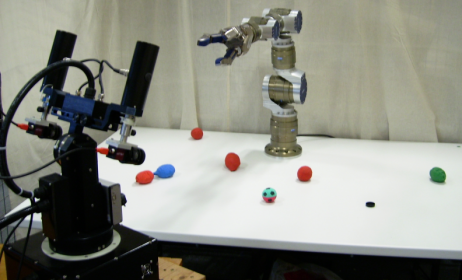
Active vision system (manufacturer robosoft) and a manipulator (manufacturer SCHUNK). The manipulator has 7 DOF and is equipped with a 3 finger system (7 DOF). Each finger has two arrays of tactile sensors. The vision system has 4 DOF and carries two firewire cameras plus the SCAMP vision system. The SCAMP (SIMD Current-mode Analogue Matrix Processor ) vision chip is a parallel processor array (128x128) that integrates image sensing and processing on a single silicon die providing low-cost, low-power and high-performance vision system for autonomous robot systems.
Research / Projects:
This robot system is used to develop biological inspired mechanisms on action-selection and perceptual abstraction integrating visual and tactile sensor experiences.
Related publications:
- [Ziemke et al.] ROSSI: Emergence of communication in Robots through Sensorimotor and Social Interaction. In: CogSys 2008, Karlsruhe, Germany, 2008